
 iConnectHub
iConnectHub
 Login/Register
Login/Register Supplier Login
Supplier Login





















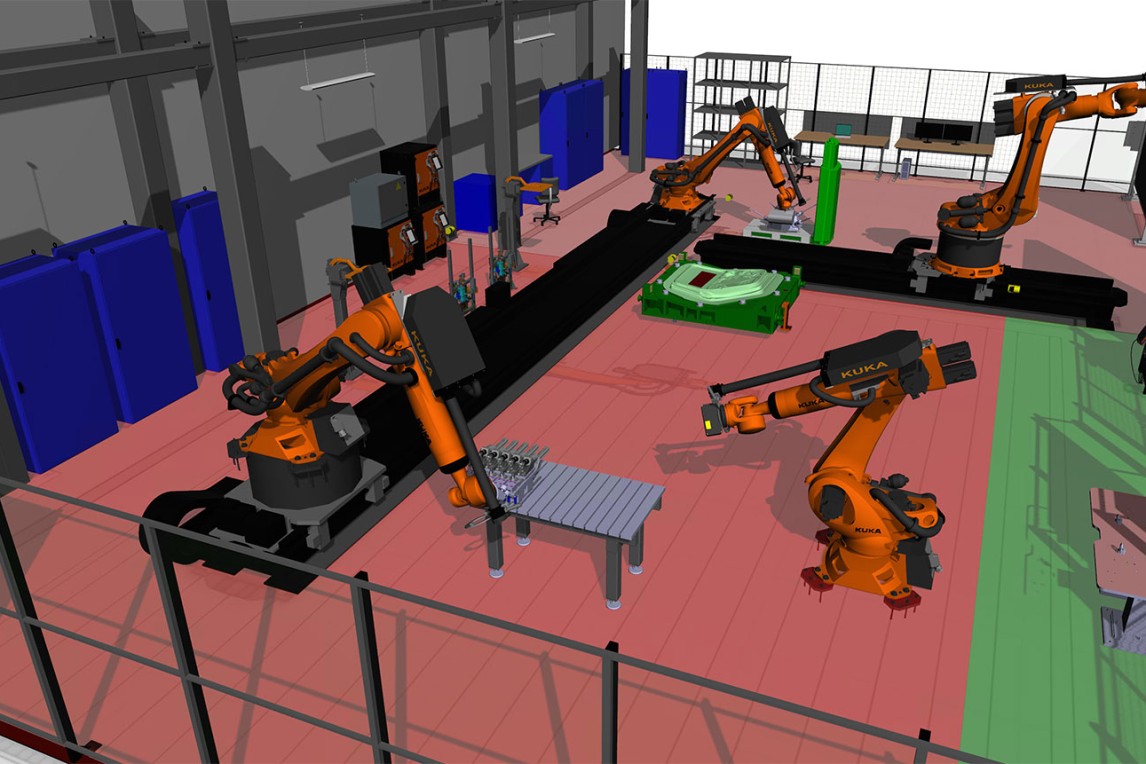
The devil is often in the details when it comes to automation solutions: Aspects of mechanical engineering, electrical engineering and computer engineering must be thought through for the desired application. The Robotics Engineering Application Lab for Matrixproduction, or REAL-M for short, of the Fraunhofer Institute for Machine Tools and Forming Technology IWU in Chemnitz is designed to map all relevant factors – the physical structure and mechanics of robots with their joints, actuators and sensors, as well as electrical systems including power supply, control and motors, right up to algorithms and decision-making.
Modern, multi-layer control architecture
At the robot level, a controller determines which movements the individual robots are allowed to perform, including in interaction with each other. A programmable logic controller and a master computer act as superordinate elements. The master computer ensures the safety of the entire cell and forms the interface to edge devices, i.e., it communicates with high-performance computers that are close to the production process and can process measurement data from sensors in real time very close to the point of action.
Premiere: digital twin of a multi-robot cell
REAL-M involves a digital, three-dimensional image not only of individual components but also of the entire cell. Specifically, a model is used for virtual commissioning (VIBN) that can be connected to the system control as software-in-the-loop (SiL) or hardware-in-the-loop (HiL). Both methods make it possible to test the functionality of the cell on the simulation model without moving the real robots. HiL involves connecting the simulation model to the actual control hardware in the control cabinet, while SiL uses an emulation (faithful copy) of the control system. This means that control solutions for other applications with directly transferable control code can be developed, tested and optimized on the realistic virtual commissioning model even while the real cell is in operation. This is particularly useful for such a versatile robot cell, as the next tasks can be tested very realistically in advance and at a desk. Virtual commissioning significantly increases efficiency at work: thanks to the simulation model's control connection, there is no difference between operating the simulation and the real system.
100 percent reliable simulations for shorter time-to-manufacturing
The Robotics Engineering Application Lab for Matrixproduction is prepared for simulation with currently four interacting robots according to robotics engineering standards. The maturity of a production concept and its processes should thus achieve a completely new level of quality and reliability even before commissioning, especially in the case of complex manufacturing systems in which several robots are integrated. Challenging, rapidly changing manufacturing tasks can be processed quickly, and the time from order to manufacturability (time-to-manufacturing) is significantly reduced. Interested companies can test in Chemnitz whether their production concept works as planned. The Fraunhofer IWU will make its software solution available to customers and offer consulting services to go with it, as well as demonstrating the approach and cost-effectiveness of the digital twin to REAL-M to interested parties – so that companies can make the transition from digital image to real production even faster and with fewer feedback loops.
Further convergence of simulation and reality
REAL-M in particular represents a major advance in the further convergence of simulation and reality. Factors such as the size or payload and reach of the integrated robots, their accuracy, kinematics, drive control, ambient temperature, material properties or inaccuracies in the product remain a challenge to map accurately – but one that can now be better managed. Control engineers and designers can now explore the limits of a digital twin and simulation results in even greater detail.
Matrix production: optimized for capacity utilization and highly flexible
The generic term for the interaction of the processes mentioned is matrix production. The essential features of such a production system are flexibly arranged manufacturing modules or cells that are optimized for capacity utilization, can be loaded by driverless transport systems, and can manufacture a wide range of products. The individual manufacturing islands master all relevant production principles, are networked with each other and enable the component to pass through in the sequence that makes the most sense for the component – for the perfect point of completion. Matrix production has long been one of the main research areas of the Fraunhofer IWU at its locations in Dresden and Chemnitz – with REAL-M in Chemnitz as the core element of matrix production in real operation.
Exemplary: sustainable use of hardware (re-use)
Incidentally, about half of the robot hardware and gripping technology in REAL-M comes from an earlier body shop system installed at the Fraunhofer IWU and could be reused: the researchers helped existing technology to achieve the desired new capabilities by means of a software update and thanks to a new control architecture.




